CheckerBot
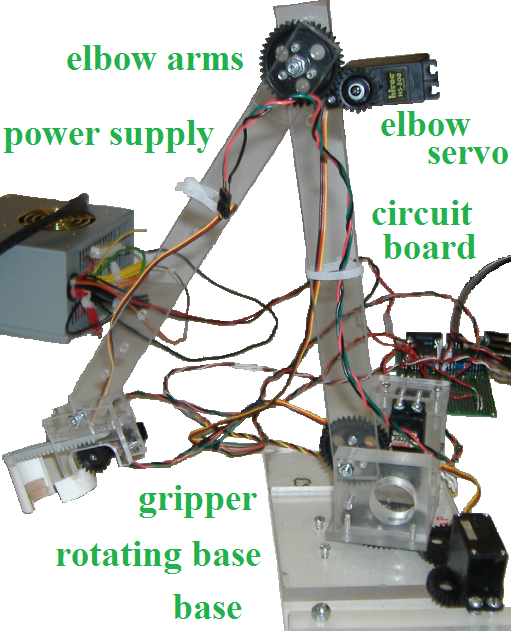
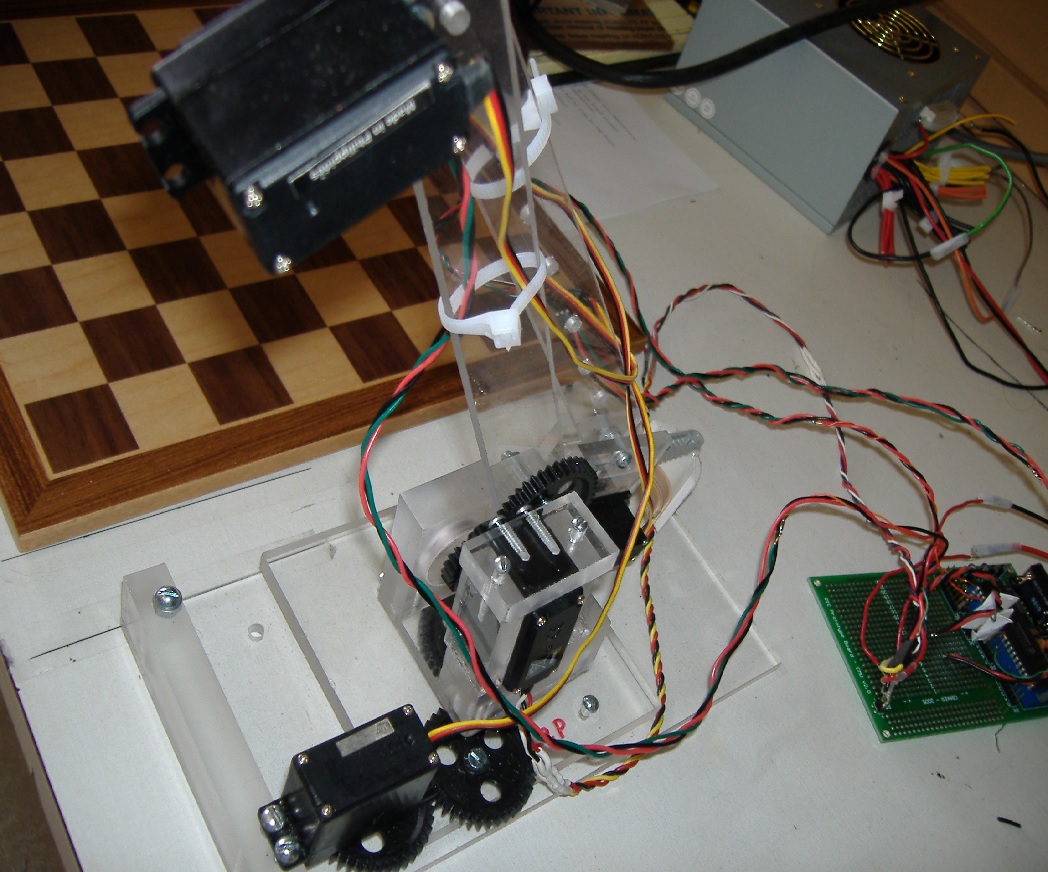
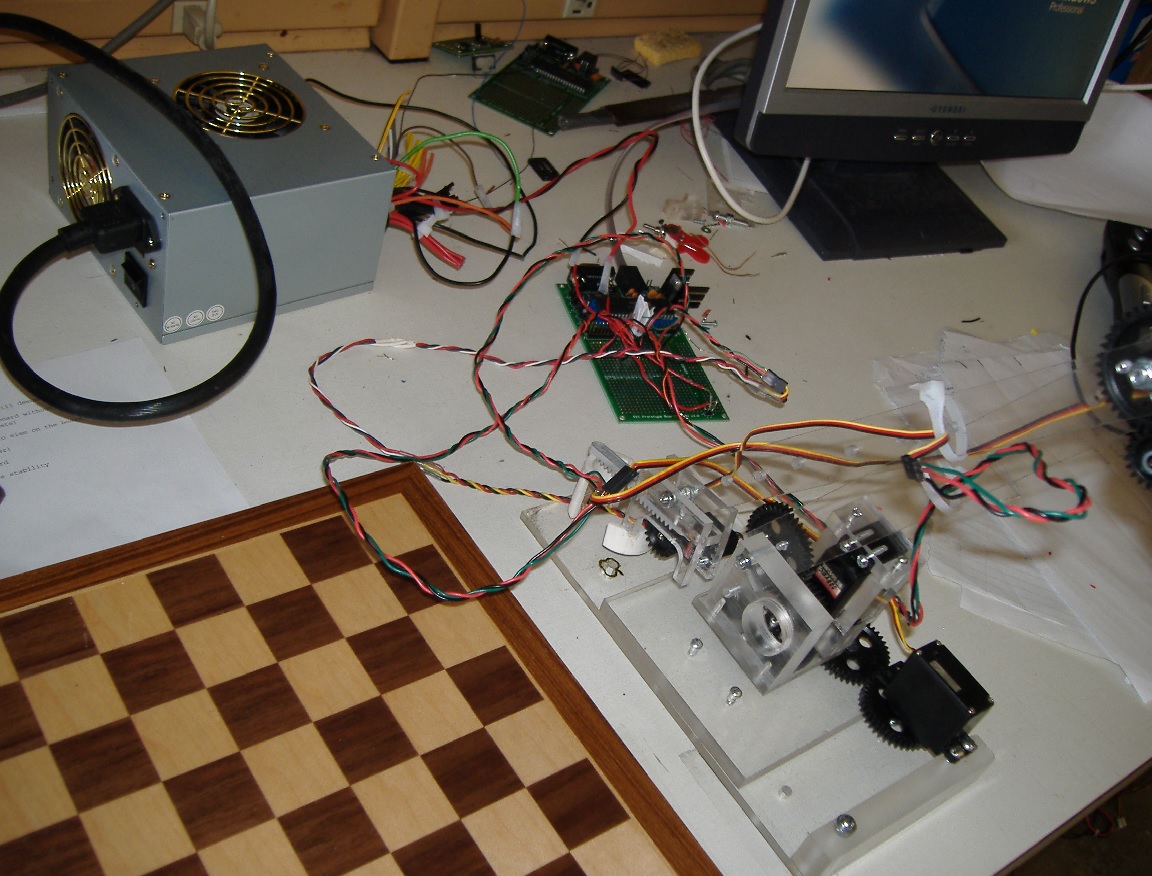
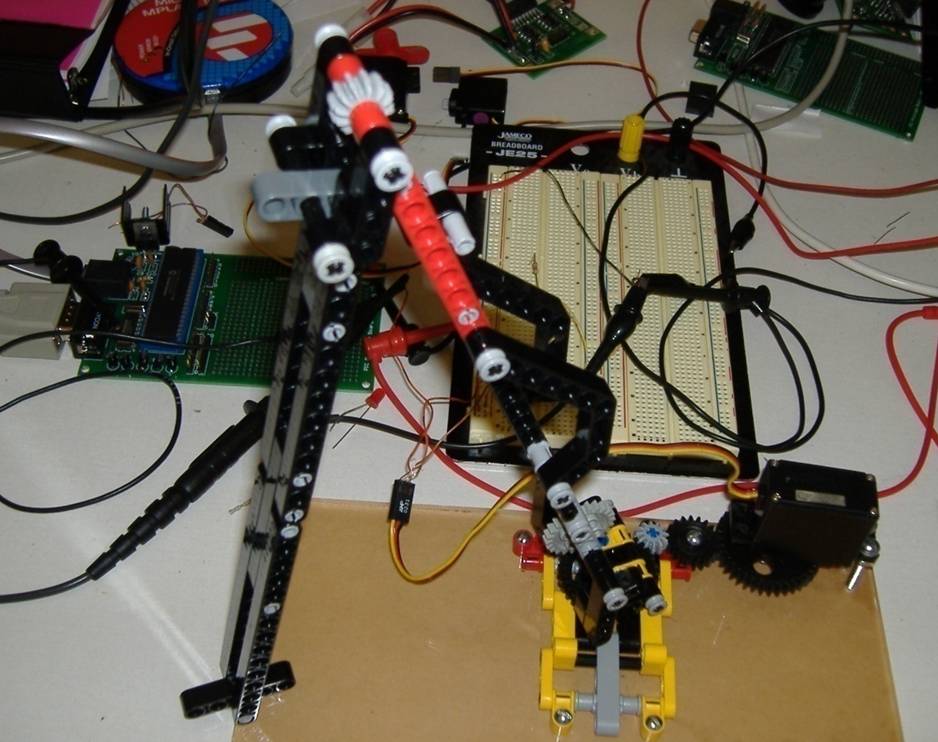
Mechatronics is an interdisciplinary field consisting of mechanical, electrical, and software engineering. The purpose of this group project was to design and build a robot that plays checkers. This included constructing a physical model, connecting the model to a power supply, controlling movement using motors, encoders, and servos, and implementing a checker AI to compute legal moves. As the mechanical engineer in the group, my main responsibility was to design and construct the physical model. Through prototyping using Lego pieces, the final parts were eventually machined and assembled together. The robot was controlled by four servos, and it consisted of a rotating base, an elbow arm, and a gripper.
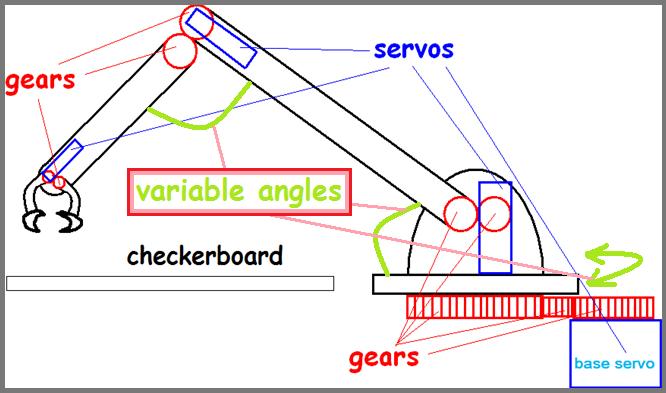
Final design uses a rotary arm that reaches all spaces on the checkerboard.
How it works:
1. Base is controlled by a servo, and will rotate at a fixed corner next to the checkerboard.
2. The elbow arms extend across the checkerboard to different squares.
3. All positions are pre-defined after calibration of each angle on the joints.
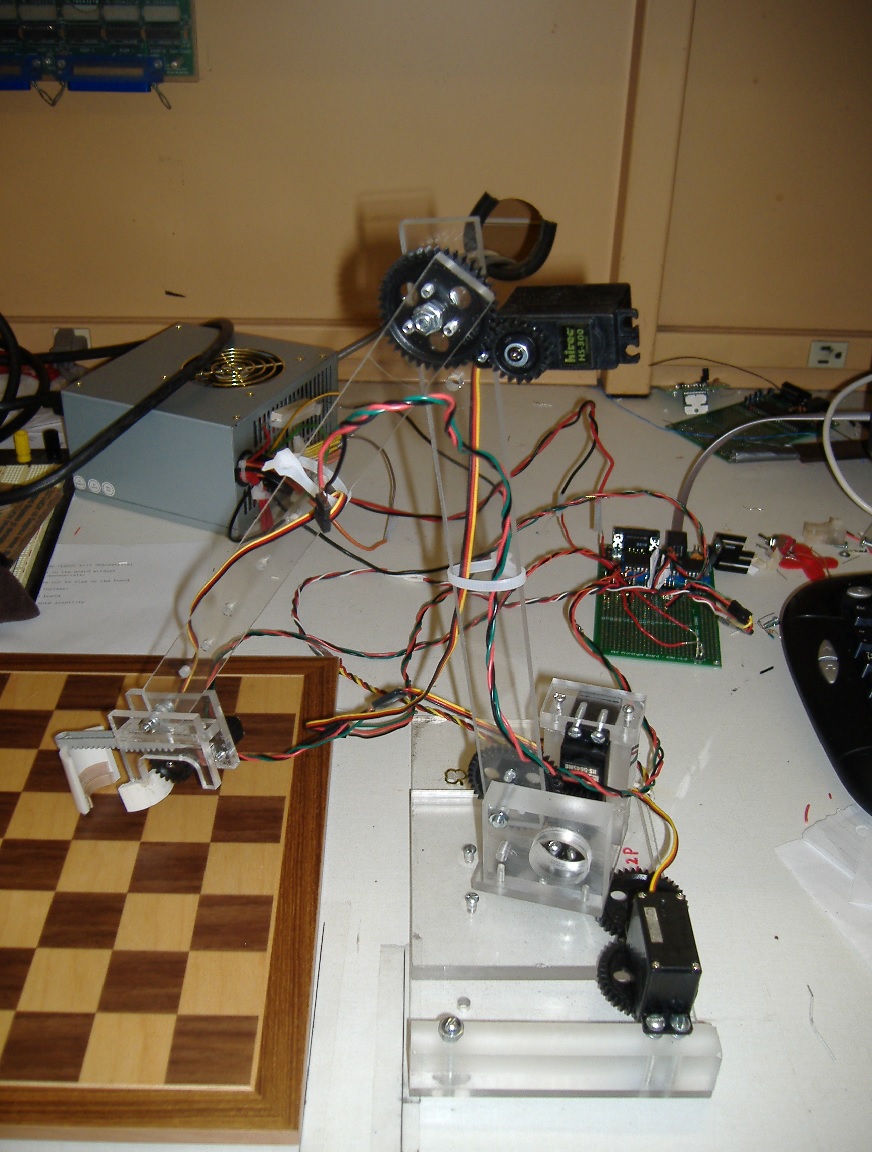
4. The clamp will be controlled by a servo to pick up and place checker pieces in the correct positions after moving or capturing.
Mechanical Subsystems
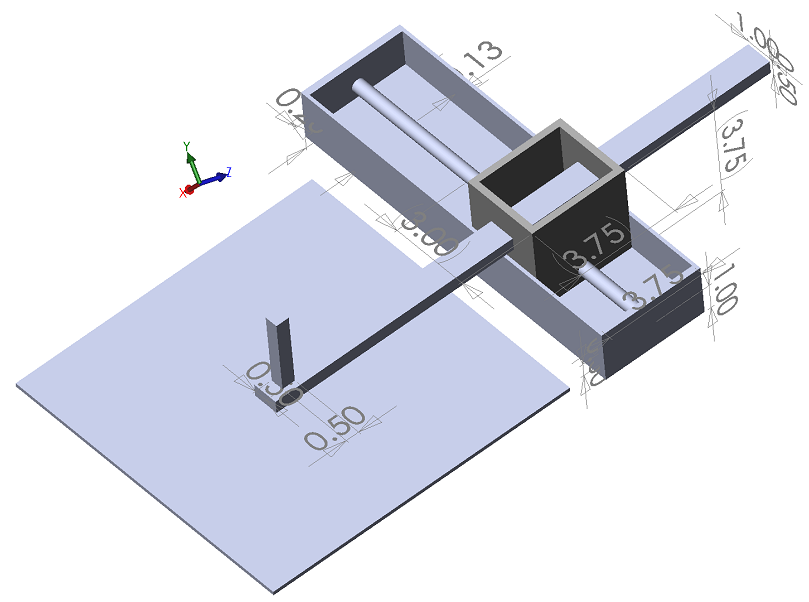
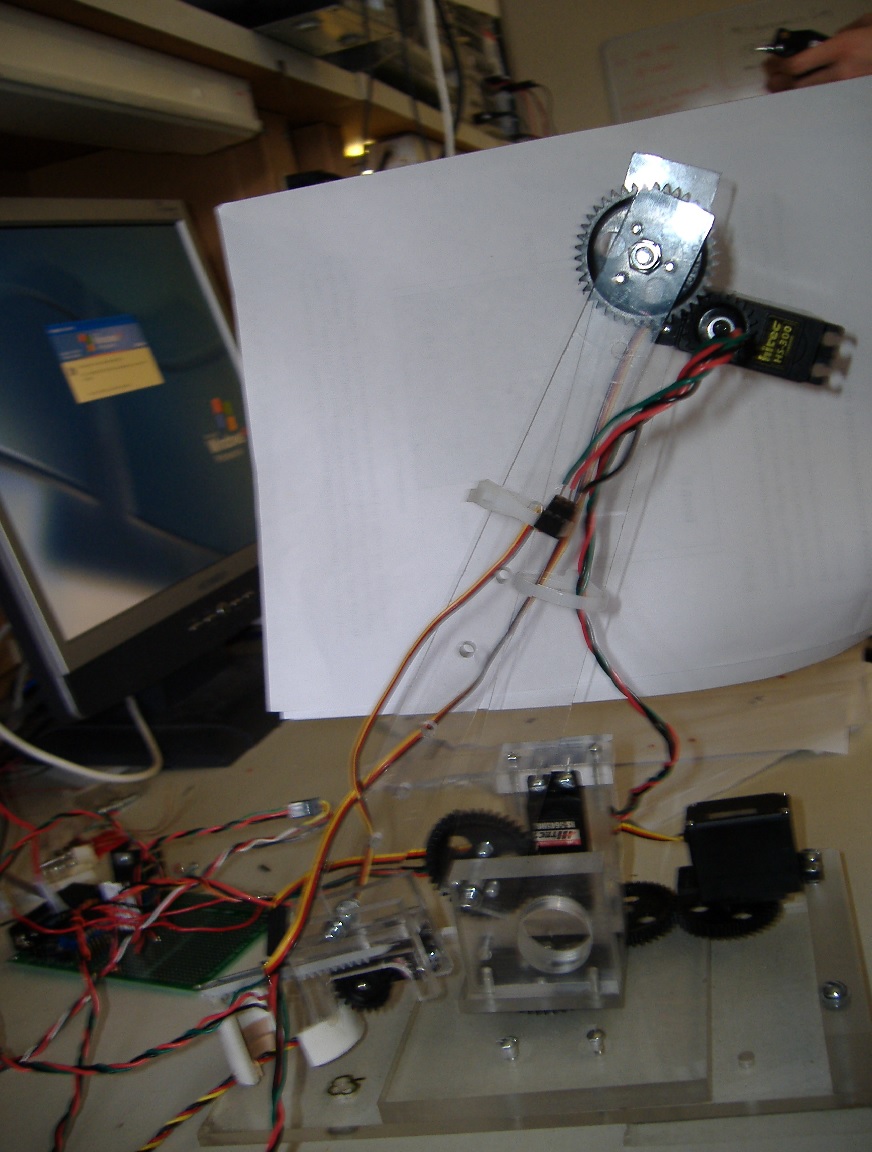
Subsystem 1: Rotating Base
Base is controlled by a 56 oz-in servo with a gear train consisting of four gears.
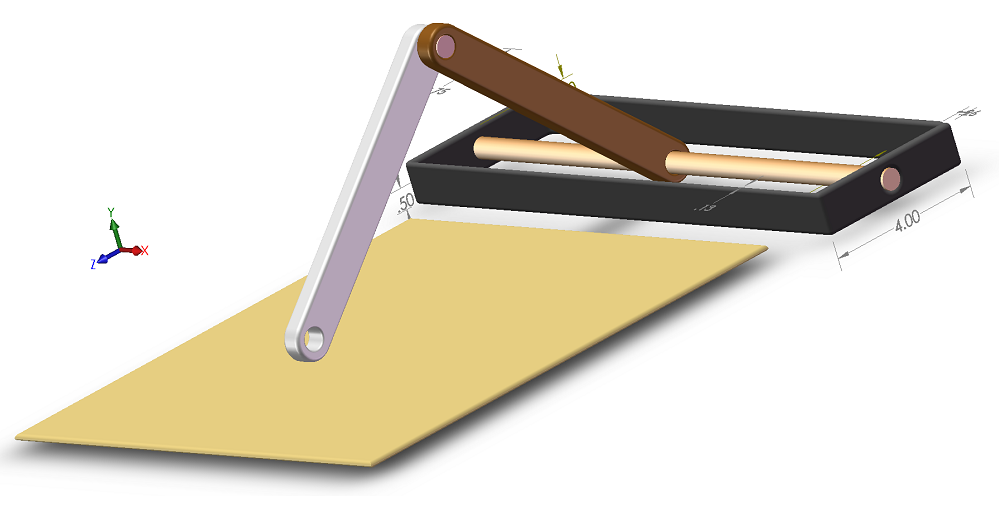
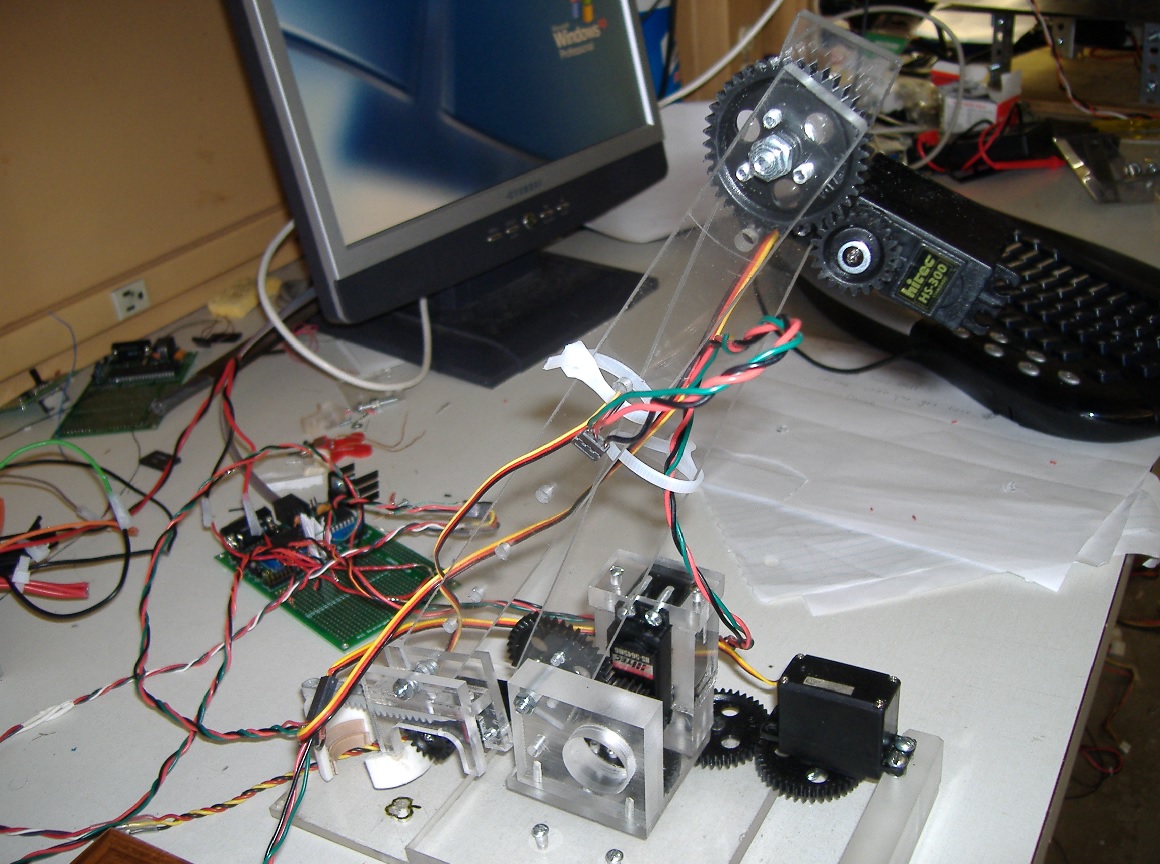
Subsystem 2: Arm
The arm attached to the heavy duty servo controls the initial location of where the gripper rests.
Subsystem 3: Elbow
The angle between the two arms is controlled by a servo. This subsystem also positions the checker pieces in the squares.
Subsystem 4: Gripper
The gripper consists of a rack and a pinion. Its main function includes gripping regular pieces and kings, as well as releasing them in the correct locations.
Materials List:
1 base
2 arms
1 clamp
4 servos
10 gears
Electrical Subsystems
Consists of an old computer supply, PIC Board and 4 servo motors. The power supply was hacked by attaching a 10Ω-10W power resistor across the 5V and ground lines and shorting the green sense wire. The computer supply provides power to the PIC board, and the PIC board would then power the servos and send an input signal to each of them. Each servo needs a +5V connection, a ground connection, and an input signal.
Minimum Project Goals
To construct a model that lies within the range of specifications, pick up a single checker or kings without interfering other pieces, deposit pieces within the squares, make a legal move in 20 seconds, demonstrate the ability to pause in the middle of a game, and being able to start from an arbitrary game state.
