Swarm Robotics
Flocking is a collective animal behavior often found in nature. It is exhibited by birds, fish, bacteria, insects, as well as herd behavior of land animals. Insect colonies such as bees, ants, termites, and wasps demonstrate how a large number of individuals interact to create a collective intelligent system. This social behavior helps them to accomplish tasks that are beyond the capabilities of an individual. Swarm robotics, inspired from observation of social insects, is a novel approach that coordinates a large number of simple robots to represent a strong cumulative force. This project introduces two phenotypes of swarm robots, the worker and the scout, each with different physical properties and swarming mechanisms.
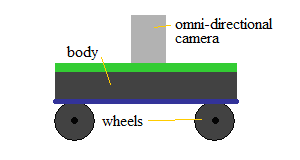
Phenotype 1: Scout
Functions of scout robots include mobility, target detection, ability to navigate and determine distance between other robots and objects, communicate with other scouts, assign tasks for workers, and sufficient memory space to map out the explored terrain to determine the most efficient path to complete tasks. Some of the feature characteristics of scout robots are listed below:
• Large memory capacity
• High locomotion speed
• Assigns tasks
• Determine most efficient path
• Does not flock
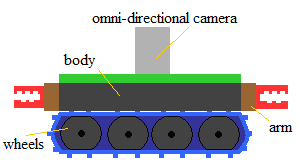
Phenotype 2: Worker
Worker robots have a few similar functions to scout robots such as mobility, target detection, navigation, and communication. Other functions include gathering resources, performing tasks assigned by scouts, linking with other workers to perform difficult tasks, flocking, and searching for scouts to receive tasks when no task is being performed. The feature characteristics of worker robots are as follows:
• Low memory capacity
• Low locomotion speed
• Performs tasks
• Assists other workers
• Flocks